
Описание
12/24/36/48/60 V 600 W DC бесщеточный мотор драйвер ток/скорости/позиции контроль PID
Максимальный выходной ток: 12A
Максимальная Применимая Мощность двигателя: 420 Вт
Непрерывный выходной ток: 10А
Подходящий Двигатель: бесщеточный двигатель

Функциональные характеристики двигателя AQMD6010BLS:
1. Поддержка напряжения 9 В ~ 60 в, Номинальный выходной ток 10А, максимум 12А
2. Поддержка потенциометров и переключателей, аналоговые сигналы и уровни логики, PWM/частоты/импульсных сигналов, а также несколько входные сигналы RS485
3. поддержка регулирования скорости рабочего цикла (регулирование напряжения), контроль скорости замкнутого цикла (устойчивая скорость), управление замкнутым контуром (шаг/сервопривод), контроль крутящего момента (устойчивый ток), различные режимы регулирования скорости
4. Поддержка ускорения и замедления буфера времени и ускорения и контроля замедления, которые могут быть автоматически замедлены и точно расположены в течение указанного хода.
5. Поддержка одного потенциометра, двух потенциометров и двойных потенциометров для контроля положительной и обратной скорости
6., он поддерживает аналоговую настройку диапазона напряжения сигнала и логическую настройку уровня напряжения. Аналоговый сигнал может поддерживать диапазон напряжения 0 ~ 3,3/5/10 V и логический уровень может поддерживать 0/3 образования легкой пены. 3/5/12/24 V напряжение. Поддерживает настройку линейности аналогового сигнала и пороговую настройку логического уровня.
7. Поддержка внешнего PWM, Частотный сигнал на контроль скорости двигателя, Поддержка внешнего импульсного сигнала на Ступенчатый контроль двигателя
8. Поддержка MODBUS-RTU протокола связи, поддержка использования 485 мотора для рабочего цикла, устойчивая скорость, Режим многократного контроля скорости смешанный контроль
Двигатель текущий контроль pid управления, максимальная включение/выключение с одной кнопкой Ток холостого хода, стоп-сигнал ток может быть отдельно установить; Поддержка мотора перегрузку тока, подключи и остановки
9. поддерживает предельное положение внешнего концевого переключателя и лимит блокировки
10. Поддержка последовательного обучения двигателя и аварийной сигнализации о неисправности
11. Частота PWM 11,18 кГц, PWM скорость двигателя без скрипа
12. Вся защита интерфейса ESD, может адаптироваться к сложному окружению поля
13. Использование процессора ARM Cortex-M3 @ 72 МГц
14. Используйте утолщенный Алюминиевый сплав большой футляр с теплоотводом, эффект тепловыделения хороший
Подходит для параметров двигателя:
1. Номинальное напряжение двигателя 60 В Номинальная мощность: соответствующая идентификация или идентификация под 450 Вт и 10А Номинальный ток двигателя полная работа долгое время;
2. Номинальное напряжение двигателя 48 В, номинальная мощность 360 Вт и ниже правого логотипа или логотипа ниже 10А мотор Номинальный ток полный рабочий срок;
3. Номинальное напряжение двигателя 36 В Номинальная мощность: соответствующая идентификация или идентификация под 250 Вт и 10А Номинальный ток двигателя полная работа долгое время;
4. Номинальное напряжение двигателя 24 В, Номинальная мощность 160 Вт и ниже правого логотипа или логотипа ниже 10А мотор Номинальный ток полный рабочий срок;
5. Номинальное напряжение двигателя 12 В, номинальная мощность 60 Вт и ниже правого логотипа или логотипа ниже 10А мотор Номинальный ток полный рабочий срок.
(Драйвер имеет долгий рейтинг 10А и максимальный выходной ток 12А (дюжины секунд).
Номинальная мощность двигателя обычно относится к выходной мощности, учитывая потерю работы двигателя. Поэтому при расчете номинального тока следует учитывать эффективность двигателя, номинальный ток = Номинальная мощность/Номинальное напряжение/эффективность.
Электрические параметры:
Входное напряжение питания: от 9 В до 60 В постоянного тока
Номинальный выходной ток: 10А
Максимальный выходной ток: 12A
Датчик holzer напряжение интерфейса: 5 В
Максимальный ток мягкого тормоза: 6А
Выходной канал номер: одна полоса
Сопротивление потенциометра: 10 K ~ 50 K
Порт входного сигнала принимает Диапазон напряжения:-0,5 V ~ 25 V
Односторонний аналоговый диапазон сигнала:
В диапазоне от 0 до 10 в, от 0 до 3,3 В, от 0 до 5 В, от 0 до 10 В, от 1 до 4,2 в и т. д.
Диапазон напряжения цифрового сигнала:
Произвольный в диапазоне 0 ~ 24 В, Lv ttl, ttl, Hv ttl и т. д.
Входной сигнал PWM поддерживает Частотный диапазон:
От 100 Гц до 10 кГц; Примечание: Выходная ШИМ Частота фиксированная 18 кГц
Диапазон поддержки входного сигнала частоты: 0 ~ 10 кГц
Выходная PWM частота: 18 кГц
Выходное разрешение PWM: 1/1000
Диапазон параметров связи RS485:
Скорость Baud 9600 ~ 115200bps, бит данных 8, поддержка нечетных, даже, без проверки, проверка бит и остановка в общей сложности 2 Бит
Поддержка Modbus: модуль-RTU, поддержка 03 H, 06 H, 10 H код функции, настраиваемый от диапазона адреса станции 1 ~ 128, поддержка трансляции
Разрешение обнаружения тока: 0.01A
Точность постоянного управления потоком: 0.1A
Диапазон скорости рабочего цикла: 0 ~ 100%
Диапазон управления стабильным контролем скорости:-3276,8 ~ 3276,7 Гц
Диапазон регулирования положения:-2147483648 ~ 2147483647
Диапазон управления крутящим моментом: 0 ~ 12.0A
Ограничительное управление: поддержка; два внешних концевых переключателя лимит или время отключения
Мягкий старт/мягкий тормоз: поддержка; предельный ток запуска, торможения и настройки ускорения и замедления времени и ускорения
Защита от перелива/отключения: поддержка; Выходное время перелива; Отключение при подключении
Защита задней панели питания: поддержка; Встроенный 10А быстрый предохранитель, предохранитель
Выход защита от короткого замыкания: встроенная флеш-память 10A предохранитель, предохранитель
Время работы тормоза: мягкий тормоз обычно 0,1 s ~ 0,3 s
Рабочая температура основной платы:-25 C ~ 80 C
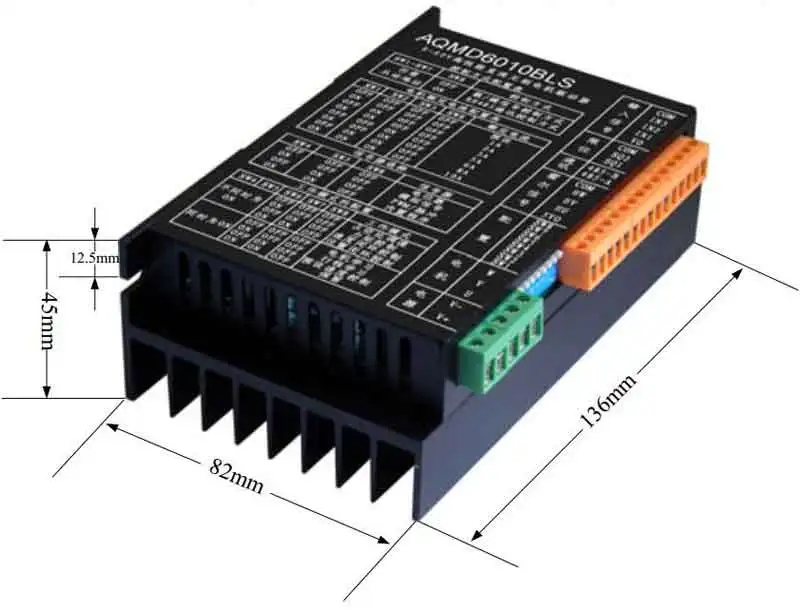
Форма Размер: 13,6 см x 8,2 см x 4,5 см
Вес: 500 г
Характеристическая функция:
1. Самообучение Holzer
Трехфазная линия и Трехфазная сигнальная линия двигателя могут быть соединены с драйвером в последовательном порядке. Управляя кодом переключателя, рабочий режим-это обучение двигателя, и после подключения питания драйвера, последовательность
Хользер двигателя может быть автоматически изучен. Двигатель может управляться, как правило, путем обучения после 6 коммутационного контроля двигателя.
2, время отклика постоянного контроля скорости
Условия испытания: двигатель 48 в 500 Вт диаметр 8 см полюс номер 6 на поворот 18 Реверсивный без нагрузки
Конфигурация параметров: параметры скорости PID настроены в свою очередь на 0,2, 0,01, 0,01, и положение PID настроено на 30, 0,01, 0,01, и ускорение все настроены, чтобы быть 6500 Hz/s
Тесты результаты:
Когда алгоритм постоянной скорости выбирает контроль скорости с замкнутой петлей, мотор переключается с положительных 3000 об/мин до 900 Гц (обратная частота 3000 об/мин), и время составляет около 1,0 с, и перегрузка 0.3%.
Когда алгоритм постоянной скорости выбирает управление замкнутой петлей во времени, мотор переключается с положительных 3000 об/мин на обратную 3000 об/мин, и время составляет около 0,5 с, а превышение составляет 2%.
3, очень низкий контроль скорости
Алгоритм стабилизации скорости с замкнутым контуром может использоваться для управления двигателем на очень низкой скорости и постоянной скорости (менее 60 об/мин), а контроль скорости двигателя равномерный, быстрый и медленный, и минимальная скорость
Можно контролировать до 1 об/мин.
Примечание: параметры положения PID должны быть меньше, например 10, 0,01 и 0,01 в свою очередь.
4. автоматический контроль ускорения и замедления поршневого движения
При управлении поршневым движением драйвер может узнать общий ход поршневого движения заранее (или также непосредственно настроить числовое значение). В зависимости от ускорения, ускорения и максимальной скорости
Конфигурация, мотор автоматически контролируется для быстрого и плавного перемещения в положение мишени в соответствии с правилами движения Ньютона.
5. двигатель регулируется в любом положении в фиксированном состоянии
Драйвер может узнать общий ход поршневого движения заранее (или также непосредственно настроить числовое значение), а затем использовать потенциометр, аналоговый или PWM для регулировки положения мотора в фиксированном ходу, и положения
Двигатель Линейный с входным количеством. Если потенциометр вращается на среднюю точку и коэффициент входной нагрузки приведен 50%, Мотор будет перемещаться в среднюю точку хода.
6. бесщеточный мотор также может управляться шаг за шагом
Входной сигнал выбирается как ШИМ/частота/пульс, импульсный тип настроен как пульс, и рабочий режим настроен как Управление позицией. Он может управлять бесщеточными двигателями, такими как шаговые двигатели. Он может контролировать угол вращения двигателя
Одним импульсным сигналом, а другим одним импульсным сигналом управляется направление вращения, и угол вращения двигателя каждого импульса можно настроить.
7, бесщеточный мотор также может быть servooed
В режиме управления связью 485 контрольная позиция (абсолютное положение или относительное положение относительно текущей позиции) может быть дана непосредственно в целевое положение. Драйвер автоматически контролирует двигатель для быстрого перемещения
И плавно до целевой позиции в соответствии с правилами движения Ньютона в соответствии с установленными ускорениями, ускорением и максимальной скоростью. В процессе движения, драйвер может предсказать оставленное время, необходимое для завершения
Задачей.
Краткое введение принципа:
Драйвер использует точную технологию обнаружения, ток двигателя, ведущий бесщеточный мотор, чувство самоскорости бесщеточного обнаружения положения двигателя, регенеративный ток постоянного тока тормоза (или тормоза) Технология и мощный PID
Технология управления может идеально контролировать двигатель заднего хода, заднего хода и плавного торможения, контроль выходного тока в реальном времени для предотвращения перегрузки по току точного контроля скорости двигателя и положения вращения двигателя, короткое время отклика и
Небольшая отдача.
Управление ускорением и замедлением двигателя: режим мягкого запуска автоматической регулировки тока и автоматического управления ускорением, мотор может начать быстро и плавно, и противовес небольшой. Поддержка ускорение и
Время замедления, ускорение и замедление.
Управление торможением двигателя: Автоматическая регулировка электрического тока в режиме энергопотребления, время торможения двигателя короткое и не ударопрочная вибрация. Поддержка конфигурации тока тормоза.
Управление коммутацией двигателя: процесс переключения двигателя вперед и назад контролируется внутренним управлением водителя, автоматическое замедление, мягкое торможение и мягкое управление пуском. Независимо от того, насколько часто сигнал заднего хода
Изменения не приведут к повреждению привода или двигателя.
Контроль скорости двигателя: через Holzer скорость обнаружения сигнала и положение вращения, алгоритм регулировки PID используется для управления замкнутым контуром, который поддерживает два режима управления скоростью, управление замкнутым контуром и закрытое положение времени
Управление с обратной связью.
Контроль положения двигателя: через Holzer Обнаружение сигнала положения вращения, использование PID алгоритм регулировки для положения замкнутого цикла управления, с помощью сопротивления тормоза, чтобы замедлить.
Крутящий момент двигателя управления: путем регулировки размера выходного тока для осуществления контроля размера крутящего момента двигателя.
Защита от перегрузки двигателя и стойла: Когда двигатель перегружен, драйвер выпустит ограничение тока и эффективно защитит мотор. Когда двигатель заблокирован, драйвер может обнаруживать состояние и тормозить двигатель.
Внутреннее подавление помех: соединение между схемой драйвера и схемой управления достигается за счет потребления помех и режима подавления переходных помех, который может эффективно гарантировать, что схема управления не
Зависит от помех цепи вождения.
Подавление внешних помех: использование устройства защиты ESD и статический заряд цепи для защиты всех интерфейсов от ESD, так что Внутренняя схема стабильно работает и защищает внутренние устройства от быть подверженным переходному
Высоковольтный электростатический сбой на интерфейсе.
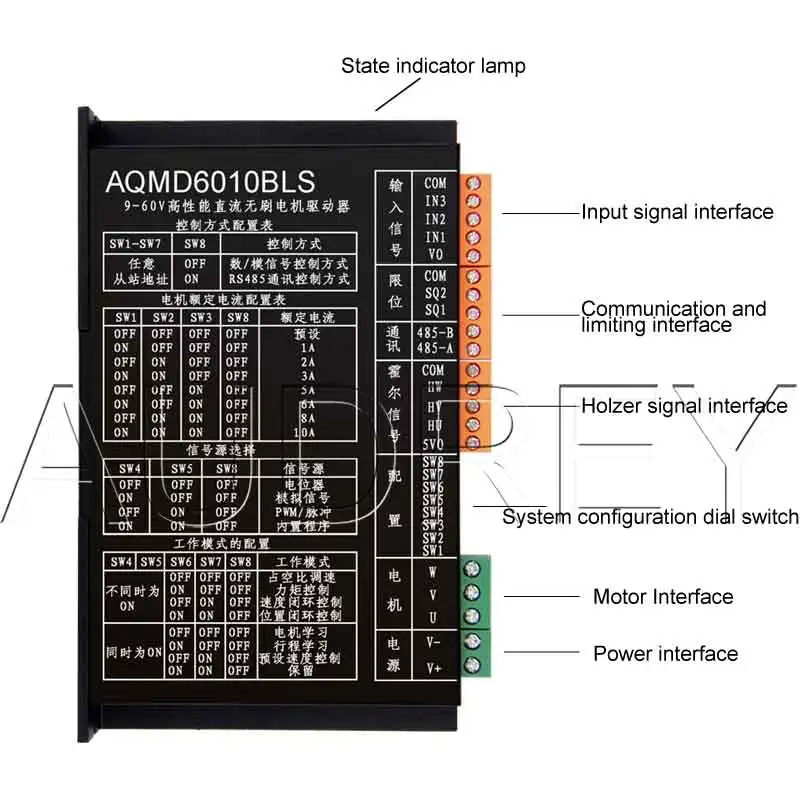
Интерфейс Разрешение:

Конфигурация переключателя набора номера:
1. Конфигурация режима управления
SW1-SW7 | SW8 | 控制方式 |
В произвольном порядке | OFF | Режим управления цифровым/аналоговым сигналом |
Рабочий адрес | На | 485 Связь режим управления |
2. выбор источника сигнала
SW4 | SW5 | SW8 | Источник сигнала |
OFF | OFF | OFF | Потенциометр |
На | OFF | OFF | Аналоговый сигнал |
OFF | На | OFF | ШИМ/пульс/частота |
На | На | OFF | Встроенные программы |
3. Номинальная конфигурация мотора
SW1-SW3 | SW4-SW7 | SW8 | Номинальное значение тока двигателя |
Выкл ВЫКЛ | В произвольном порядке | OFF | 485 конфигурации Номинальный ток по умолчанию 8.4A |
На Выкл | В произвольном порядке | OFF | 2A |
OFF ВКЛ/ВЫКЛ | В произвольном порядке | OFF | 3A |
На ВКЛ/ВЫКЛ | В произвольном порядке | OFF | 4A |
Выкл на | В произвольном порядке | OFF | 6A |
Вкл/Выкл на | В произвольном порядке | OFF | 8A |
OFF на | В произвольном порядке | OFF | 10A |
ВКЛ | В произвольном порядке | OFF | 12A |
4. Конфигурация Схемы работы
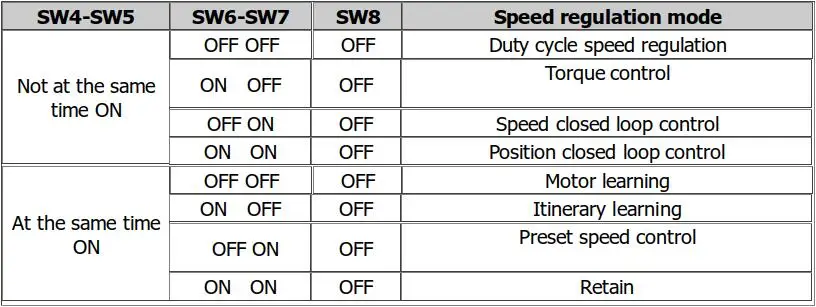
Характеристики
- Тип двигателя
- Двигатель постоянного тока
- Бренд
- SHABEAM
- Напряжение
- 48 В
- Номер модели
- AQMD6010BLS
- Питание
- DC
Сопутствующие товары









